My role in this project was to control the robot and provide the desired position and orientation of the end-effector. The slicer code provided the specific details for this positioning. The 6-axis Motoman Yaskawa robot has the capability to achieve a given pose with multiple configurations. To identify the best possible set of configurations and to determine the feasibility of attaining each specified pose along the toolpath, the robot’s inverse kinematics is solved.
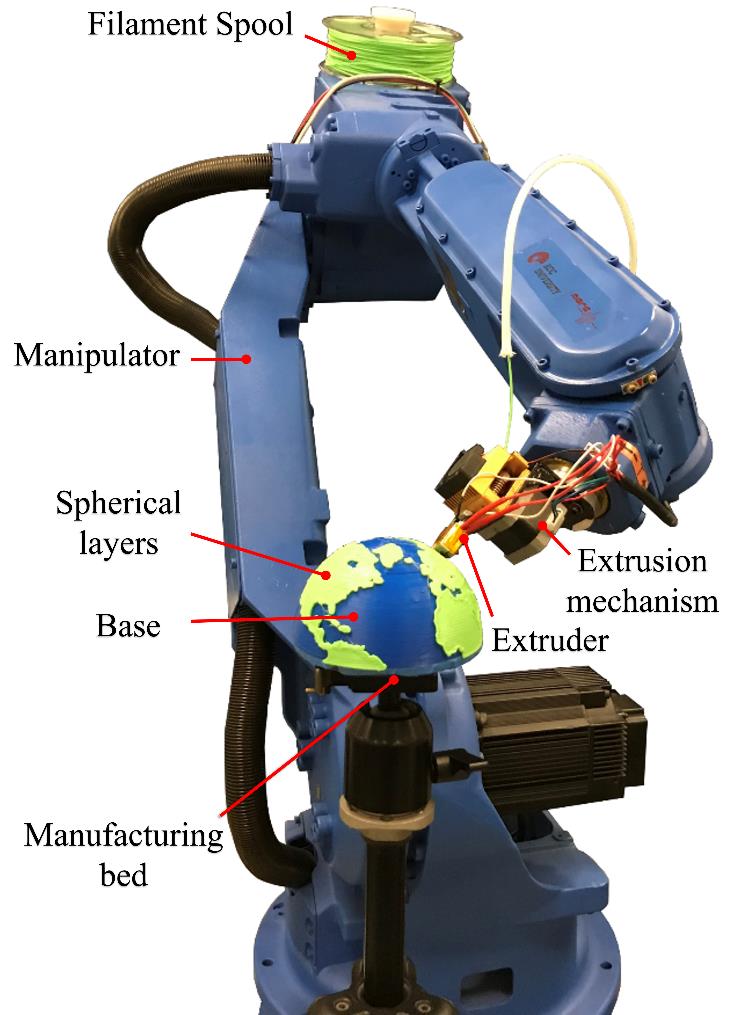
- The setup uses an extruder connected to the Motoman HP20 industrial robotic arm.
- The robotic arm has six servos and is controlled by the NX100 controller.
- The controller operates using JOB files written in the Inform language, similar to G-code in additive manufacturing machines.
- The controller’s original design is for smaller tasks like welding and pick-and-place, leading to limited memory capacity for JOB files.
- Additive manufacturing programs can be extensive, containing numerous lines of instructions for positioning and material deposition.
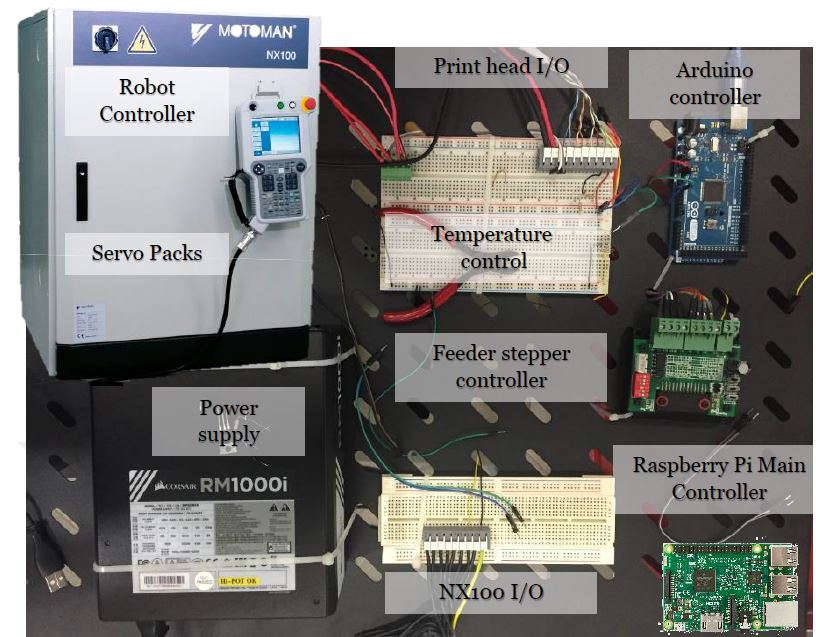
To address memory limitations, a Raspberry Pi Computer is utilized to continuously update the JOB files on the controller. The Raspberry Pi takes over the main control function, enabling the system to handle more complex additive manufacturing tasks.