Design, manufacture and performance analysis of Quadruped Spider- 3 DoF for each leg made it capable of following various trajectories and give the opportunity to implement stable motion patterns
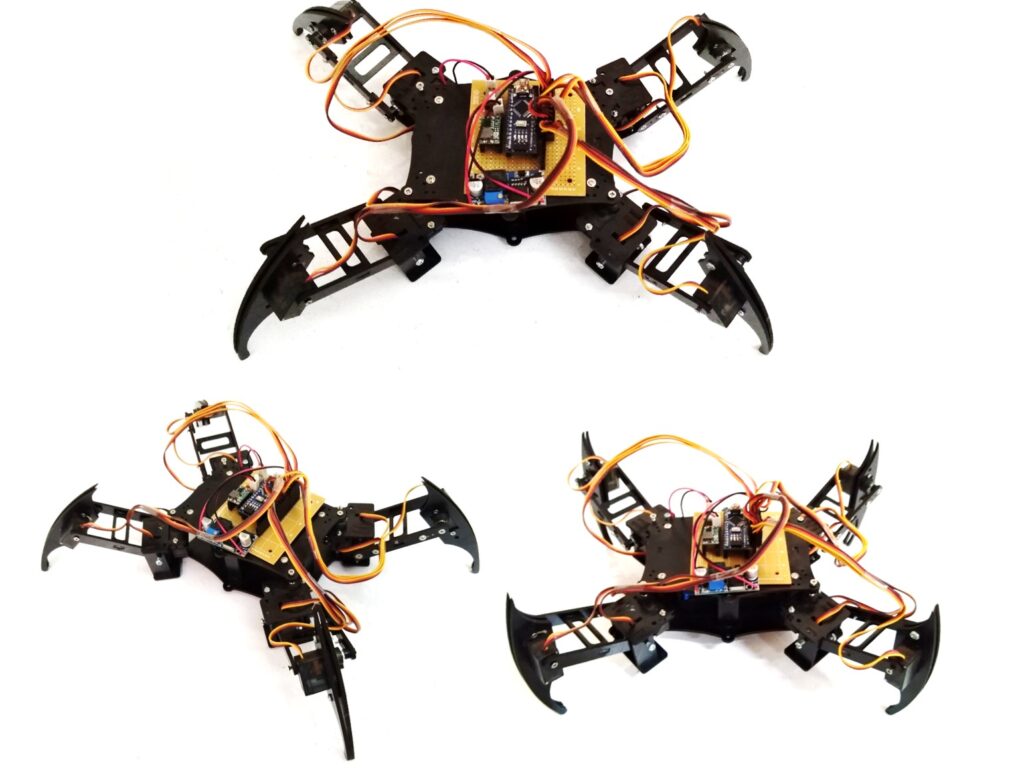
The main purpose of conducting this research is to design and fabricate a quadruped
robot that is inspired by spiders to implement and gain stable motion patterns. To achieve this goal, Firstly, we have found similar designs and after evaluating their performance, advantages, or limitations, by considering the degree of freedom for each leg, we concluded on its conceptual design.
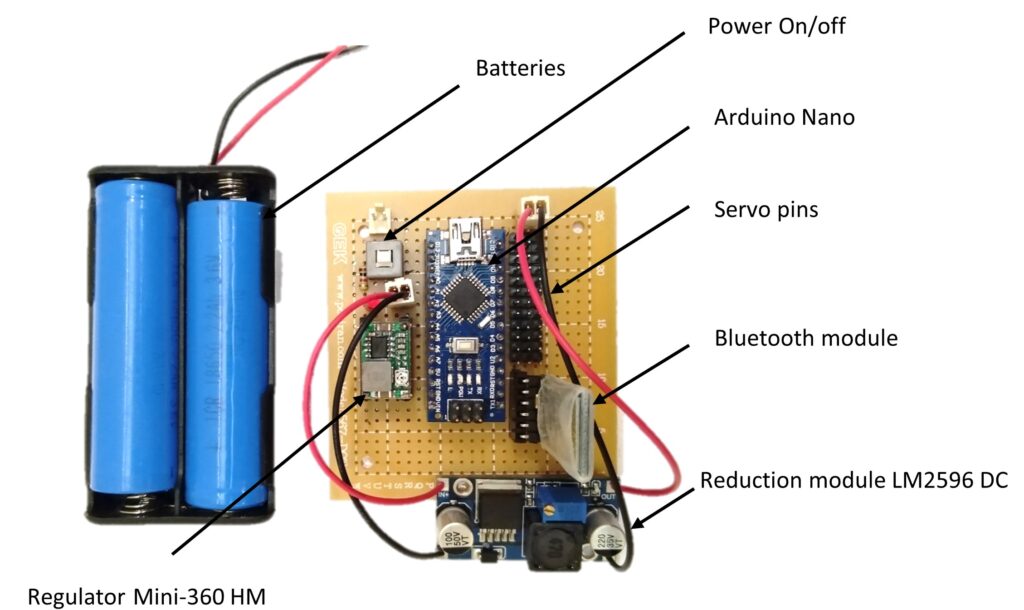
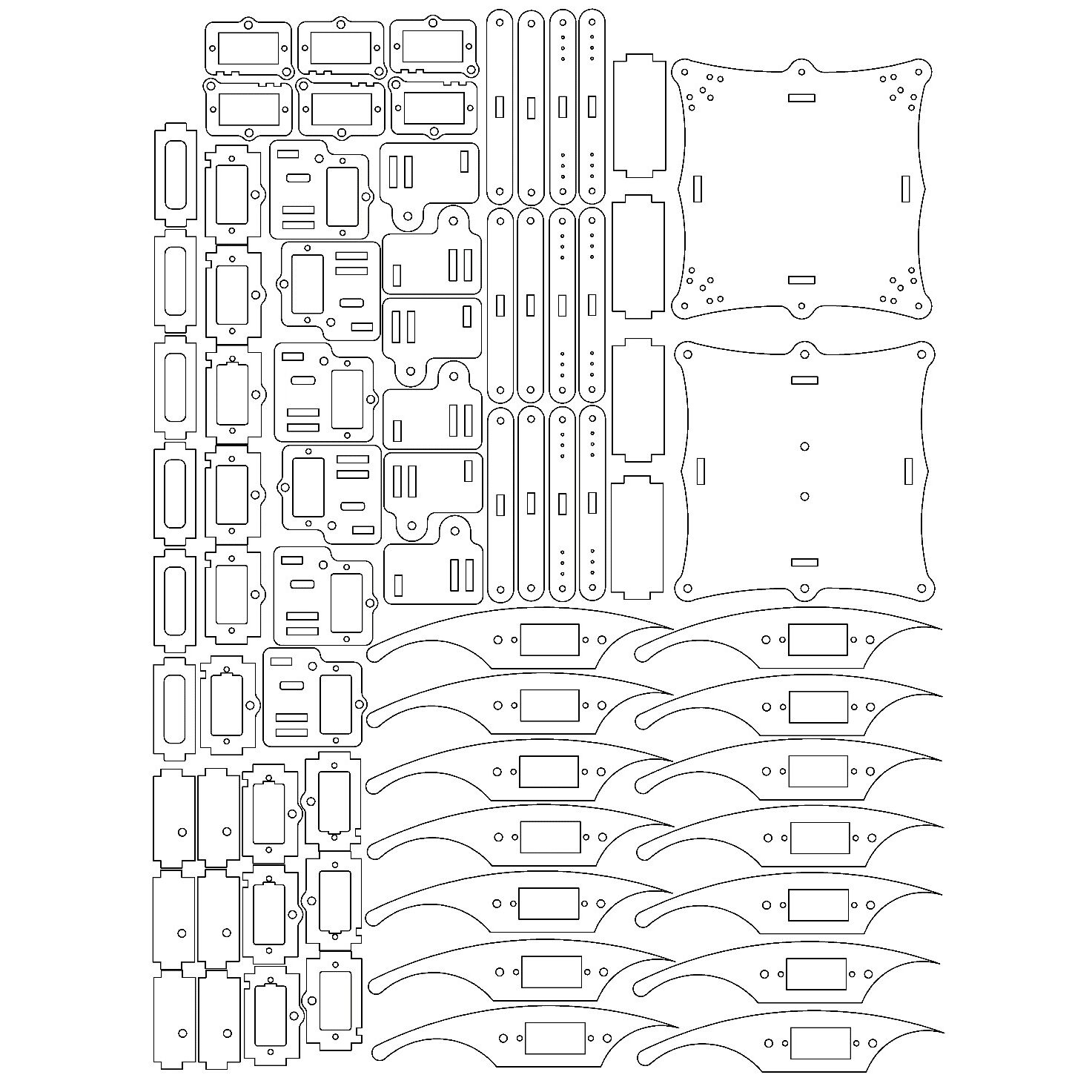
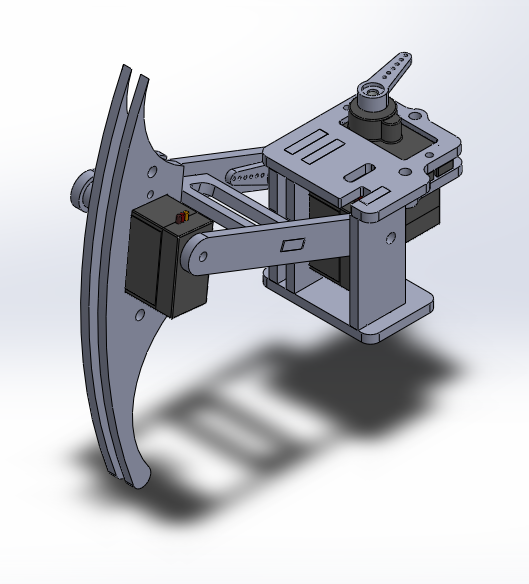
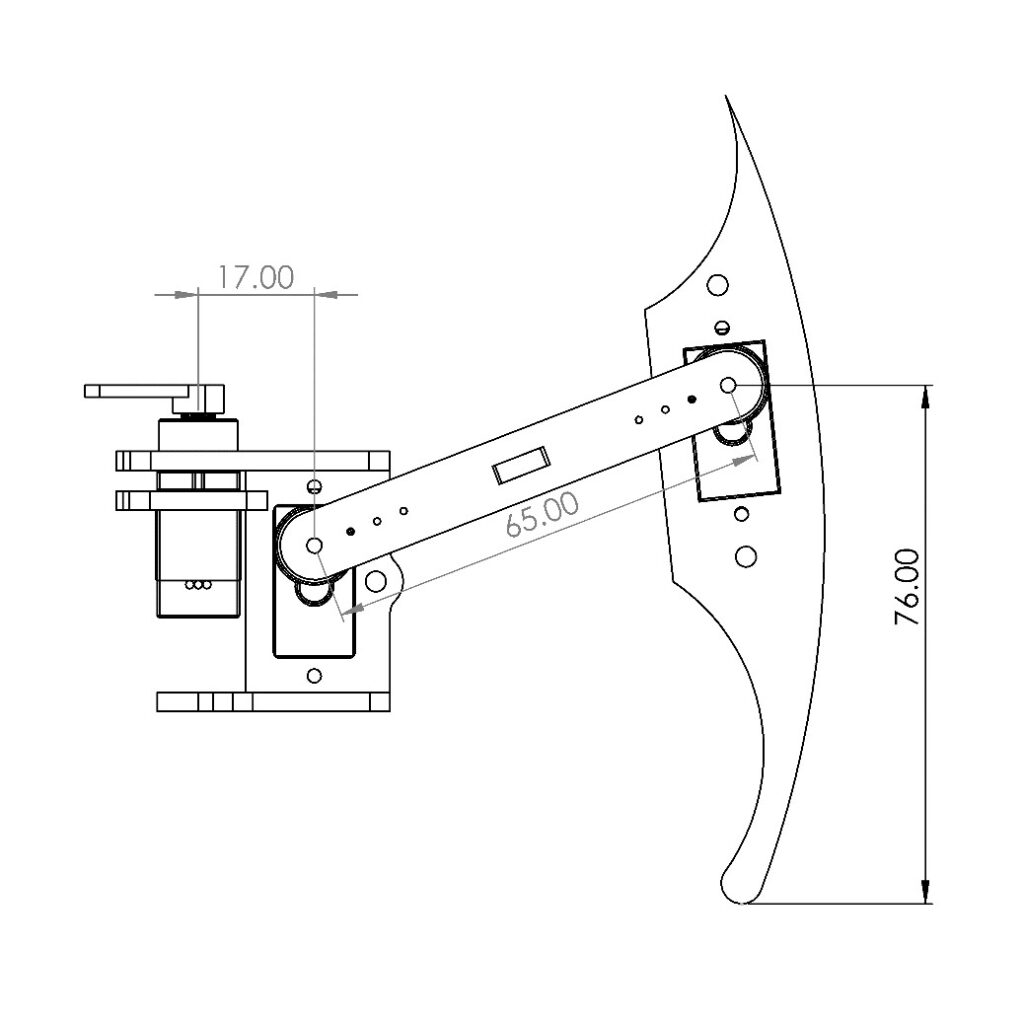
In the next step, kinematic and kinetic calculations of the robot’s motion had been done and by having the results, we have chosen the appropriate actuators for the robot. Completion of the calculations led to the detailed design and after that integration of mechanical and electrical parts has been completed.

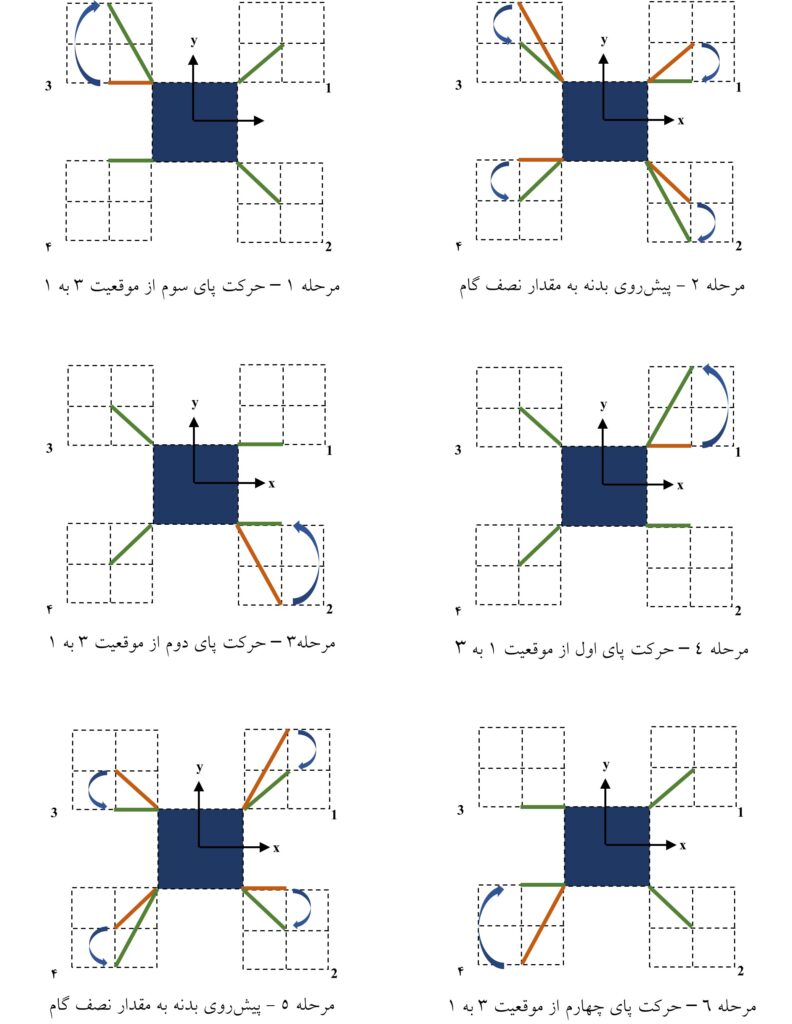
The achievement of the robot allowed us to compare the motion patterns of the robot. In this way, we can develop and investigate the trajectory planner and motion stability of the robot by using direct and indirect kinematic. In conclusion, the robot can explore through a 2D surface by having a stable straight forward and rotation gait set with its exact trajectories end-effector.